科研平台3:深度学习基础算力平台
来源: 时间:2024/08/21机器人往往会面临动态、开放及对抗的复杂环境,采用运动学/动力学建模与任务理解等传统常规方法设计的机器人技能无法适应非结构化工作环境及多样性的任务。该平台提供一种深度强化学习框架,构建虚实融合的具备自主决策和学习能力的机器人技能学习方法,通过设计多任务/多目标动作网络,建立自引导探索机制,从探索机制、数据利用、奖励函数设计三个方面开展提升机器人任务中强化学习效率,缩短机器人交互、学习与部署时间,并保证较高的控制精度,使机器人在复杂、动态环境中持续学习并获取技能(如位移、速度、力、姿态、可操作性、刚度等运动特征),实现机器人系统对作业技能的高效学习机制与快速迁移方法。相关成果有望应用于工业机器人、服务机器人、仿人机器人、体育竞技机器人等多个领域机器人技能学习场景。
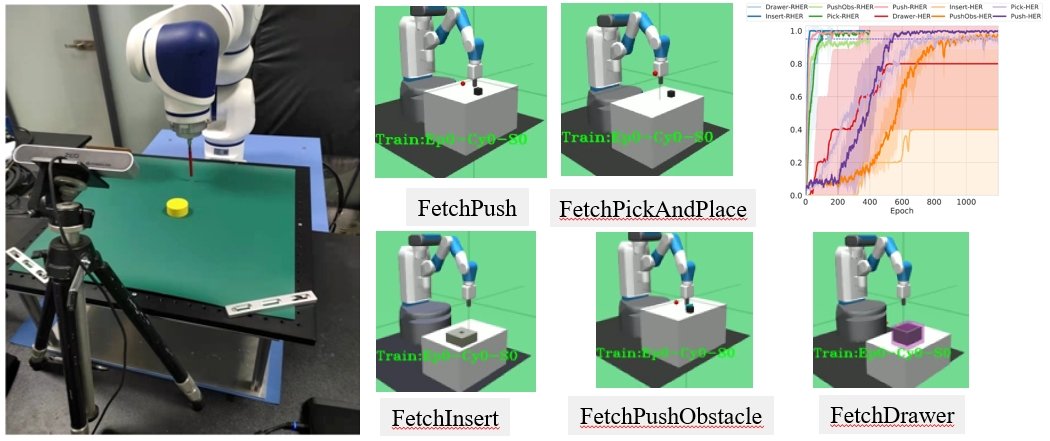
面向机器人操作任务的高效深度强化学习平台
实验室现有AI 算力服务器资源:H100*8、4090 D*8、A800*2、3090*8、2080Ti*8
(1)Nvidia H100集群:高性能高显存显卡,通用算力60 FP32 TFLOPS,AI算力989 BF16 TFLOPS,80 GB显存

(2)Nvidia 4090 D:高性能显卡,74 FP32 TFLOPS算力,24 GB显存

(3)Nvidia A800:高显存显卡,19.5 FP32 TFLOPS算力,80 GB显存

(4)Nvidia 3090(35.6 FP32 TFLOPS算力,24 GB显存)和2080Ti(13.4 FP32 TFLOPS算力,11 GB显存)
