科研平台2:基于彩色多普勒超声诊断仪图像引导的医疗机器人模拟手术操控平台
来源: 时间:2024/08/21该平台属于智能化高性能微尺度高通量感知及操控机器人平台的辅助设备,用于配合Ultra-speed2快速扫描原子力显微镜与IX73全内反射显微镜联用设备,实现生物样品或医学标本内部组织结构的区域超声自动探测与形貌信息诊断,为合肥物质科学研究院目前在研的多项科研任务提供一种先进的空间、时间双高分辨率检测平台,以及全新的观测、研究技术手段。
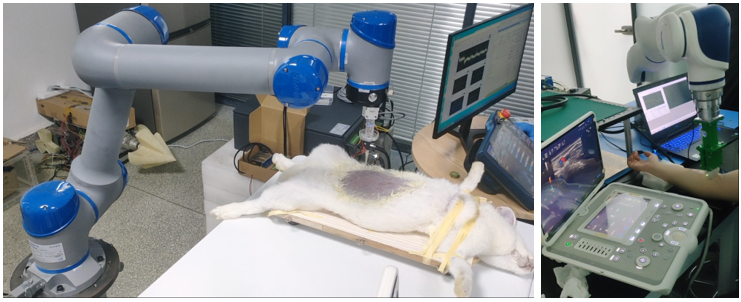
基于彩色多普勒超声诊断仪图像引导的医疗机器人模拟手术操控平台